zoeken
×
Mijn account
Afrekenen
0 items
+31-648412125
info@toolsvoorjou.nl
Hijsgereedschap
Kettingtakels
Rateltakels
Loopkatten
Lieren
Hefgereedschap
Dommekrachten
Potkrikken
Vijzels
Hydraulische vijzels
Mechanische vijzels
Hefmagneten
Werkplaatskranen
Transport
Palletwagens
Hefwagens
Transportrollers
Spanbanden
Spankettingen
Ladingnetten
Hijs- Sjorkettingen & toebehoren
Spankettingen
Hijsogen
Oogbouten
Oogmoeren
Spanschroeven
Tycan®
Grijpers en klemmen
Balkenklemmen
Platenklemmen
Vatenklemmen
Kraantechniek
Driepoot
Portaalkranen
Stroomvoorziening
Sleepringlichamen
Kabelvlieters
Uitverkoop OP = OP
Home
/ Producten getagged “handmechanische loopkat”
handmechanische loopkat
Enig resultaat
Standaard sortering
Sorteer op populariteit
Op gemiddelde waardering sorteren
Sorteren op nieuwste
Sorteer op prijs: laag naar hoog
Sorteer op prijs: hoog naar laag
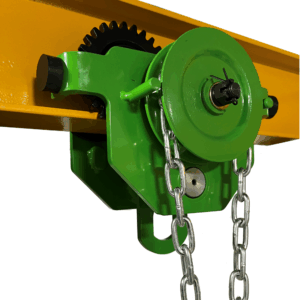
Estil hand mechanische loopkat
€
212,15
-
€
2.124,70
Prijsklasse: € 212,15 tot € 2.124,70
Zoeken
Zoeken